Le
sous-marin obéit à 2 grands principes : le principe de Pascal et le
principe d’Archimède. Ces 2 principes s’appliquent à tous les corps immergés.
Tout
d’abord, le principe de Pascal : « Sur la surface d’un corps immergé,
s’exerce une pression, en bars, perpendiculaire à cette surface, dirigée vers
l’intérieur et égale au nombre de dizaines de mètres d’immersion. »
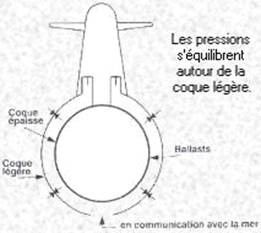
Ce
principe permet de comprendre que les forces croissantes qui s’exercent sur la
coque, tendent à l’écraser. Par exemple, à l’immersion de 100 mètres une
pression de 10 bars s’exerce, donc toute augmentation de 10 mètres de
profondeur provoque une augmentation de 1 bar. La « coque épaisse » d’un
sous-marin abrite le personnel, elle est faite en acier très résistant.
L’épaisseur de la coque est calculée en fonction de l’immersion maximum prévue.
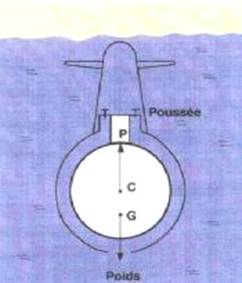
Le
principe d’Archimède : « Tout corps plongé dans un liquide reçoit de
la part de ce liquide une poussée verticale dirigée de bas en haut, égale au
poids du volume de ce liquide déplacé. »

Le
sous-marin est soumis à 2 forces :
Son
poids, qui fait descendre le sous-marin.
La
poussée d’Archimède, qui fait remonter le sous-marin.
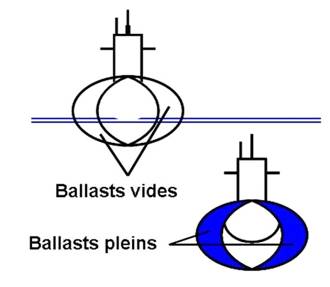
Ainsi,
lorsque le poids de l’eau déplacée (la poussée) correspond au poids du
sous-marin l’équilibre est obtenu donc le sous-marin flotte. Lors de la
plongée, on ouvre les purges des ballasts qui se remplissent d’eau et le poids
du volume d’eau supplémentaire déplacé est égal au poids de l’eau contenu dans
les ballasts, un nouvel équilibre est donc obtenu. Le sous-marin s’enfonce un
peu plus à chaque volume d’eau ajoutée, ce qui donne un nouvel équilibre. En
immersion maximale les ballasts sont totalement remplis d’eau. Quand on
remplace l’eau des ballasts par de l’air, le poids du sous-marin diminue du
poids du volume d’eau évacué des ballasts : la poussée (aussi appelé
déplacement en plongée) est donc supérieure au poids du sous-marin. Le
sous-marin remonte jusqu’à ce que la valeur de la poussée diminue avec la
hauteur de l’immersion et on obtient un nouvel équilibre poids/poussée.
Il
faut définir le poids du sous-marin en fonction des ballasts pour obtenir
l’égalité poids/poussée, c’est la « pesée » mais il faut aussi que le
sous-marin puisse naviguer droit, alors trois données entrent en jeu :
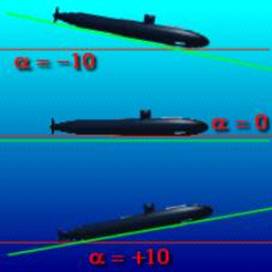
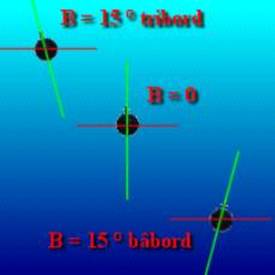
L’assiette
du sous-marin qui définit son inclinaison longitudinale c'est-à-dire l’angle
que fait le fond du sous-marin avec le haut de la mer. Elle dépend de la
position du centre de gravité par rapport au centre de la poussée. Lorsque
l’angle est nul, le sous-marin est horizontal et est en assiette zéro.
La
gîte du sous-marin qui définit son inclinaison transversale c'est-à-dire
l’angle que fait l’axe longitudinale du plan transversal avec la verticale donc
quand le sous-marin est trop chargé à bâbord, il s’incline vers la gauche, on
parle alors de la gîte sur bâbord et inversement pour tribord il y aurait donc
de la gîte sur tribord.
La
stabilité qui est la qualité qu’à le sous-marin de revenir en assiette zéro
sans gîte. Il faut alors abaisser au maximum le centre de gravité,
la « pesée » du sous-marin est donc nécessaire pour faire naviguer
le sous-marin en plongée et en assiette zéro sans gîte.
Les
sous-marin suite a leurs utilisation ont besoin d'une propulsion puissante, un
moteur indépendant a l'air et permettant une grande autonomie au sous-marin, et
d'un combustible compact prenant le moins de place possible
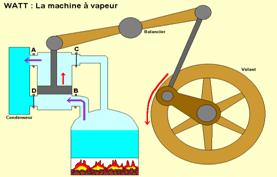
Le
premier système de propulsion de sous-marin
répondant à la majorité ces qualités fut le moteur a vapeurs qui
fonctionné avec une chaudière a foyer principale et la vapeur d'eau compressée
qui y sortait mettait en mouvement une turbine qui elle était reliée à un axe
central ou se trouver au bout l’hélice.
Puis
une innovation intelligente permis l'optimisation du moteur à vapeur. Le
« nouveau système » conserve la rotation de la turbine et d'un axe
mais se dernier ne fait pas tourner l'hélice mais fait fonctionner une dynamo
qui recharge des batteries. Ce système à doubles propulsion vapeur-électrique
permet une plus grande autonomie et une conservation de l’énergie grâce aux
batteries
Ce
système fut aussi adapté au moteur diesel.
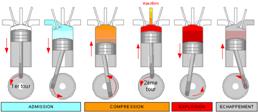
Moteur
diesel
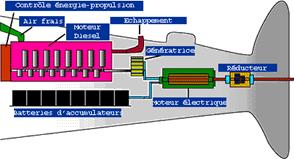
Moteur
diesel électrique (ex : Argonaute)
L’inconvénient
de ses 3 moteurs était que la recharge de batteries devait se faire lorsque le
sous-marin était en surface. Car le moteur diesel ou à vapeur à besoin d'air
pour son fonctionnement.
Une invention allemande le schnorchel a parmi
la possibilité d’équiper les sous marin avec des moteurs diesel. Le schnorchel
est en faite un tuyau qui une fois déployé lorsque le sous marin est immergé
permet d’atteindre l’air au dessus du flot qui est ensuite injecter dans le
moteur.

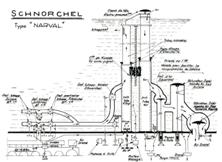
Un
système de clapet permet l’impossibilité de rentré d’eau par le schnorchel.
Le
moteur diesel-électrique sera le moteur le plus utilisé dans les sous marin
jusqu’à l’invention du moteur nucléaire.
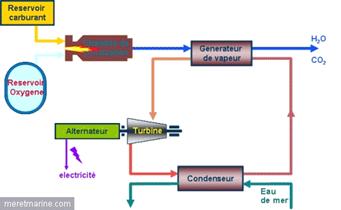
Le
moteur nucléaire est aujourd’hui le moteur le plus performant pour les sous
marins il répond à toutes les qualités imposé par l’utilisation du sous marin
c'est-à-dire : une propulsion puissante, un moteur indépendant à l'air et
permettant une grande autonomie au sous-marin, et d'un combustible compact
prenant le moins de place possible.
Ce
moteur fonctionne grâce à un « mini réacteur nucléaire » dont
l’énergie thermique est la conséquence de la fission d’atomes d’uraniums faite
en chaines. Cette énergie thermique chauffe un réseau d’eau qui est mis en
pression puis qui fait tourner une turbine qui fait fonctionner le moteur
électrique qui entraine l’hélice. Un second réseau d’eau est présent pour
refroidir le réacteur.
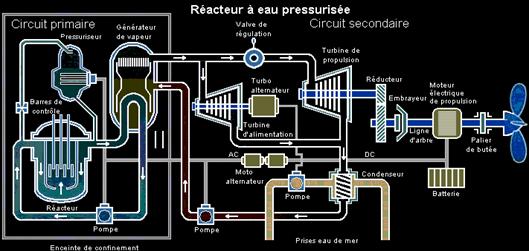
Notée que l’énergie
électrique est principalement stockée dans des batteries.
C’est
grâce aux livres de Jules Verne qu’aujourd’hui les sous-marins ont leur forme
de cigare au bout arrondie. Car le nautilus a était définie comme telles sauf
que son bout était pointue d’ailleurs au début de l’histoire le nautilus est in
sous-marin faisant coulée les navires et les marins le prenait pour un cachalot
géant.
Le seul défaut de se sous-marin était sa
taille exponentielle 70 mètres de long, une largeur de 8 mètres et une hauteur
de 5 mètres. Mais Jules Verne a tout de même réfléchis à un certain équilibre
que le sous-marin devrait garder dans l’eau à cause de son volume et du volume
d’eau qu’il déplace cela fait penser au a la poussée d’Archimède. Jules Verne a
aussi pensé à la poussé de Pascal en rigidifiant la double coque d’acier par
des liaisons T en fers. La double coque est composée d’un acier à haute densité
pour une meilleure résistance à la pression et une meilleure capacité de
plonger. La coque est aussi dessiner de manière aérodynamique pour une
meilleure fluidité dans l’eau.

L’argonaute
lui est plus petit il a une longueur de 50 mètres et une largeur et hauteur de
2 mètre pour une meilleur fluidité. Il possède aussi une double coque liée avec
des liaisons T et l’espaces entre les deux coques sert de ballaste. Sa forme est celui d’un cigare avec un bout
ramassé qui finit le sous-marin. L’argonaute joue grâce au ballaste qui se replie
d’eau ou se vide pour pouvoir plonger. Il y a eu tout de même une grande
inspiration du nautilus pour pouvoir crée la forme de tous les sous-marin
existant.
